Hardware Design
In the early stages of development on RoboPele, the team experimented
with many design ideas, however we unanimously decided to have a robot
with an external RCX unit. By having the RCX external, we would
eliminate all difficulties with respect to changing the batteries by
maintaining easy access to the battery access. In previous demos of
the Lego Mindstorms system the team had encountered the problem of
having batteries run out in the middle of an exercise. In order to
change the batteries, we had to spend costly time in dismantling our
robot to gain access to the battery panel on the internal RCX and then
reassemble the robot again to continue with the exercise.
Furthermore, the effects of reducing the cart's weight led to better
acceleration and a more consistent performance. It was noticed that
the performance and behaviour of RoboPele was dependent on the battery
power left. By having the RCX external, RoboPele would have a smaller
mass and would therefore use less battery power and accelerate more
efficiently. A robot which has a lower rate of power consumption will
have a more consistent and predictable behaviour over a longer
period. A very important consideration given the amount of testing
required to tweek the final behaviour of the robot.
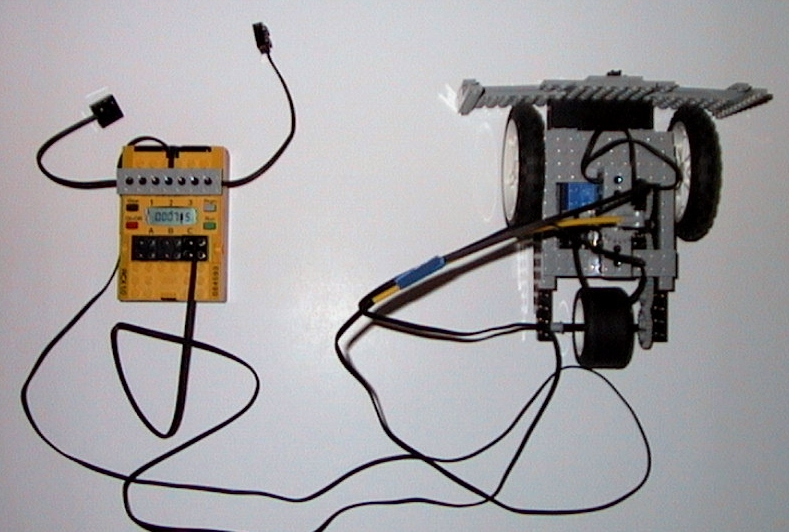
RoboPele has a tricycle design, with one powered wheel in the rear and
two wheels in the front for stability. Also, on the the left front
wheel is a rotation sensor which was used to count the number of
rotations completed by the wheel so that the RCX can keep count on how
far the robot has traveled from its original starting point.
Initially it was believed that one motor would be sufficent to power
RoboPele due to its light mass, but we later found out that we would
require two motors. Two motors were needed because in order to catch a
fast moving ball, we would need a lot of power to produce an
appropriate amount of acceleration from a stand still. Furthermore,
having two motors would give RoboPele as much as another 8 levels of
power, thereby increasing the output granularity. The two motors can
be seen in the following figure, located at the center of the cart.
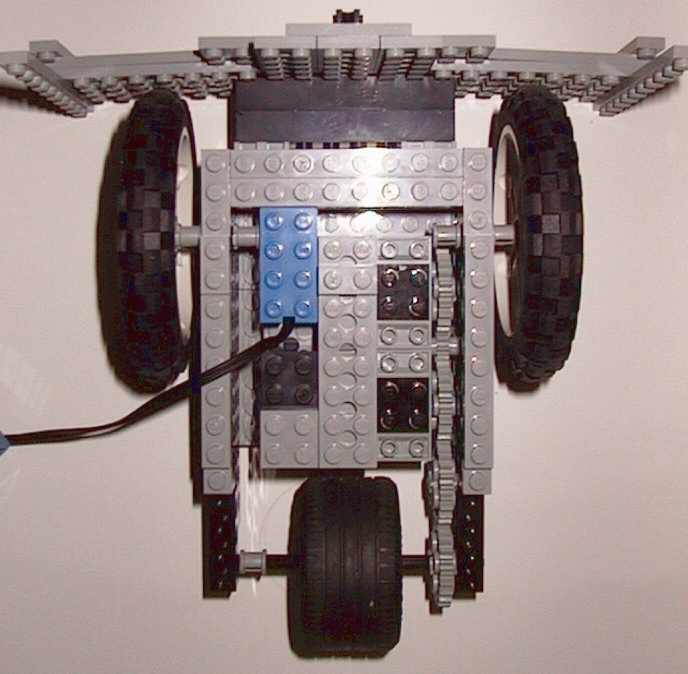
Also visible in the cart are a set of gears. The purpose of these
gears was to provide not only a means of combining the motors into a
parallel power source but to also provide greater torque - important
for quick acceleration and overall responsiveness.
The construction of RoboPele's ramp was a trying one. Initially embedded in
the ramp was two touch sensors that measured the speed of the ball as
it leaves the trough. Because Lego has "bumps" on their tops, we
orientated the ramp upside down, smooth side up. We decided on this
orientation because the bumps on the Lego caused the ball to move in
an unpredictable fashion.
Initially we attempted to use one light sensor and measure the time at
which the ball is on top of the light sensor and correlate that time
to a given ball velocity, but we found that the light sensor was not
sensitive enough for that purpose. Next the team tried a two touch
sensor design and measured the speed of the emerging ball as a
function of the time between the two touch sensor
activations. Unfortuately, at high velocity the ball would not
activate the second touch sensor, either because there was not
sufficent force to depress the sensor or because the sensor was not
depressed long enough.

RoboPele's final design was a touch sensor and light sensor
system. This system functions in the same principle as the two touch
sensor system but the second touch sensor was replaced by a light
sensor. We corrected the problem of insufficient light sensitivity of
the light sensor by taping the perimeter of the light sensor to reduce
the amount of light reflecting off the ball and back into the
sensor. In addition, it was noticed that the black ball performed much
better than the green ball in the scoring task.